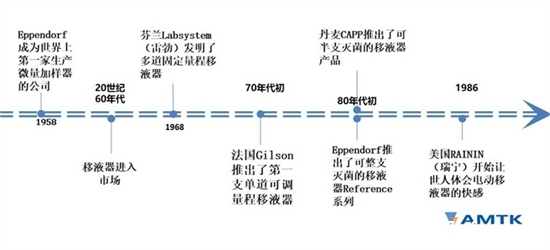
提到液体处理工作站,可能大家第一想到还是手持式移液器,那就一起来了解一下移液器的发展历程。
在移液器发展过程中,自动化移液装置也在悄悄的起步和发展中。
自动化液体处理装置的起源要追溯至20世纪70年代,当时微型直流电动机和阀门技术的发展,导致了高精度的基于注射器的半自动移液装置的引入。1971年,汉密尔顿公司(Hamilton)推出了数字稀释器,一种半自动直流电动机驱动的可调式移液装置,其使用了两个注射器作为移液活塞。70年代年代后期微处理器技术的发展使得对马达和阀门功能序列进行编程成为可能,导致了全自动的基于注射器的移液装置的发展。
20世纪80年代,电机和微处理器技术的发展使第一个真正的自动化液体处理工作站得以发展,主要来源于由临床放射免疫分析的市场需求。汉密尔顿公司和Tecan AG在20世纪70年代末合作开发了汉密尔顿AMICA 系统,它是一个基于电机控制注射器的微处理器控制的流体控制系统,用于工业分析。AMICA 系统的开发及技术转移促进了汉密尔顿2000系列和Tecan Samler 500/RSP 5000系列工作站的发展。
1982年-1984年,一家名叫Infinitek的公司一直在开发一种机器人液体处理工作站,专门用于药物发现、微平板分析技术。该公司后来卖给了贝克曼·库尔特(Beckman Coulter)。一年后贝克曼·库尔特推出Biomek 1000,它是垂直机械臂和定位平台的组合。Biomek具有可互换的多通道、基于移液吸头的液体处理工作站。
Cetus Propette出现于1986年,是一种小型的、12通道、多微滴板液体转移装置,主要用于微板转移和洗板。最初是由Cetus工程师为白细胞介素-2自动化检测的需求而设计的,但也非常受PCR工作者们的欢迎。随后,与Perkin Elmer的合作,推向生物技术领域的其他领域。
1987年汉密尔顿引进了MicroLab AT,用于批量检测全血中的艾滋病和肝炎病毒。MicroLab AT具有可变跨度,12通道,一次性吸头等特点。
1990年,TomTec公司开发了第一个96通道的液体处理工作站Quadra96,它有一个定位台底座,用于放置微板、移液吸头和储液槽,在z轴上安装了一个96通道的移液头。
现今的自动化液体处理工作站都是从这些早期的基本设计发展而来的,增加了实验室各步骤需求和软件多功能性。而无论液体处理工作站技术如何发展和更新,移液模块始终是工作站的核心,目前市面上移液方式主要有以下三种 :
空气置换式
如Eppendorf和Hamilton的自动化工作站,这个移液原理和实验室用的移液枪是一样的;利用空气置换原理来实现的吸液工作,包括使用弹簧活塞方式,或者使用高精度的注射泵来进行液体的定量吸排。使用弹簧活塞的方式进行移液时,需要设置一定的体积V1,通过压缩活塞将空气排出,并将移液枪头插入到溶液的液面以下,从而使得活塞与液面之间形成一个密封的空间,此时将活塞恢复原位,在大气压的作用下,溶液被吸入到移液枪头中,其溶液的体积V2=排出的空气体积V1。
液路式
如Tecan、Beckman和PE的一些老型号的机器,有个长长的管路,通过管路内的液压来控制吸排液体。液路式的好处在于可以通过吸排液来清洗吸头,吸头能重复使用,降低了耗材使用成本,但可能会导致样本间污染。
非接触式
可实现纳升/皮升体积的移液范围,非接触式移液方法包括阀门分配技术、喷墨技术、玻璃毛细管分配器和超声波液滴生成技术等,其中一些技术最初是为印刷工业开发的,但现在已成为生命科学领域微阵列和“芯片实验室”系统的重要组成部分。
 上手机找货源
上手机找货源


